Torseur
Un torseur d’actions mécaniques est un outil mathématique permettant de modéliser toutes les actions mécaniques.
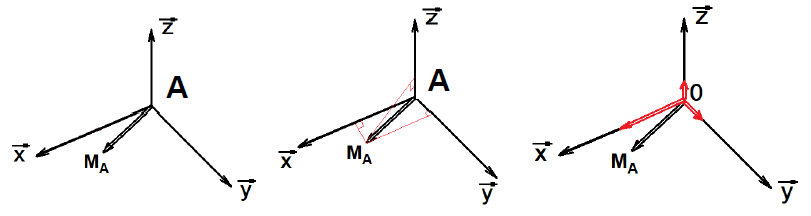
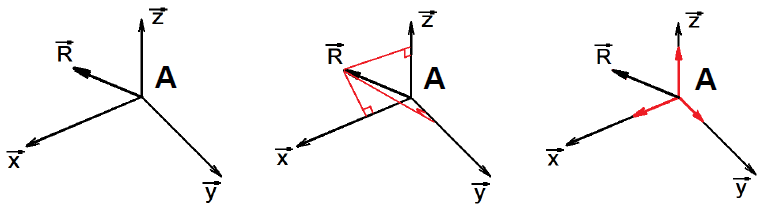
L’ensemble formé par R et MA constitue un torseur, exprimé en A, dans un repère R.
On le note :

À savoir :
Le torseur est défini par 6 paramètres :
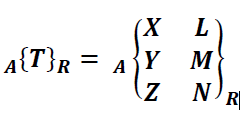
X,Y et Z sont les projections de la force sur le repère en N
L,M et N sont les projections du moment sur le repère en Nm